Abstract
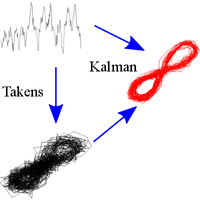
Methods of data assimilation are established in physical sciences and engineering for the merging of observed data with dynamical models. When the model is nonlinear, methods such as the ensemble Kalman filter have been developed for this purpose. At the other end of the spectrum, when a model is not known, the delay coordinate method introduced by Takens has been used to reconstruct nonlinear dynamics. In this article, we merge these two important lines of research. A model-free filter is introduced based on the filtering equations of Kalman and the data-driven modeling of Takens. This procedure replaces the model with dynamics reconstructed from delay coordinates, while using the Kalman update formulation to reconcile new observations. We find that this combination of approaches results in comparable efficiency to parametric methods in identifying underlying dynamics, and may actually be superior in cases of model error.
- Received 28 October 2015
DOI:https://doi.org/10.1103/PhysRevX.6.011021
This article is available under the terms of the Creative Commons Attribution 3.0 License. Further distribution of this work must maintain attribution to the author(s) and the published article’s title, journal citation, and DOI.
Published by the American Physical Society
Physics Subject Headings (PhySH)
Popular Summary
Methods of data assimilation, such as the ensemble Kalman filter used to estimate unknown variables, are becoming increasingly important in physics and geophysics research. Nonparametric methods for prediction have been developed from Takens’s delay-coordinate embedding. Here, we show how these two lines of research can be merged to create a methodology for extracting information from data that is greater than the sum of the parts. We test our new method using a weather data set.
We focus on situations in which variables are poorly constrained and/or models are incomplete (e.g., weather predictions). The goal of our work is to filter out noisy observations and reconstruct the underlying model. Our “Kalman-Takens” filtering method confers the statistical advantages of Kalman filtering without the necessity of applying a physical model, using reconstructed dynamics in place of a model. Since we avoid the use of a model, our results are free of biases due to strong model assumptions. We apply our method to systems with up to 40 dimensions in which observations are corrupted by up to 100% noise. We also consider an El Niño data set collected from January 1950 through December 1999, and we show that our method can filter a noisy time series without relying on a model. Surprisingly, in some cases in which there is large model error, our method is superior to using the model. However, our technique suffers from the limitation that it assumes that noise follows a Gaussian distribution.
We expect that our findings will pave the way for more accurate studies of data sets for which no underlying model is known.